Présentation des Automates
1738 - canard digérateur : C'est un canard artificiel en cuivre doré qui peut cancaner, barboter, manger et digérer comme un vrai canard. Il est possible de programmer les mouvements de cet automate.

1870 - Euphonia : C'est une machine à parler capable de produire des phrases en français, en anglais et en allemand.
Naissance du mot robot
1921- Robot : Le terme robot apparaît pour la première fois dans la pièce de théâtre de l'auteur Karel Capek. Ce mot "robot" a été créé par son frère à partir du mot tchèque "robota" qui signifie : travail, besogne, corvée.

Les trois lois de la robotique d'Isaac Asimov
1942 - les trois lois de la robotique :
-Première loi : Un robot ne peut porter atteinte à un être humain ni, restant passif, laissé cet être humain exposé au danger.
-Deuxième loi : Un robot doit obéir aux ordres donnés par les êtres humains, sauf si de tels ordres sont en contradiction avec la Première loi.
-Troisième loi : Un robot doit protéger son existence dans la mesure ou cette protection n'est pas en contradiction avec la Première ou la Deuxième loi.
-Première loi : Un robot ne peut porter atteinte à un être humain ni, restant passif, laissé cet être humain exposé au danger.
-Deuxième loi : Un robot doit obéir aux ordres donnés par les êtres humains, sauf si de tels ordres sont en contradiction avec la Première loi.
-Troisième loi : Un robot doit protéger son existence dans la mesure ou cette protection n'est pas en contradiction avec la Première ou la Deuxième loi.

Naissance de la Robotique
1941 - La Robotique : Ensemble des techniques permettant la conception et la réalisation de machines automates ou de robots.
Le premier robot industriel
1961 - Unimate : Unimate est le tout premier robot industriel. Il est en fait le descendant direct des télémanipulateurs développés pour les besoins nucléaires. Il est utilisé pour la première fois sur les lignes d'assemblages de Général Motors.

Un robot utilisé en médecine
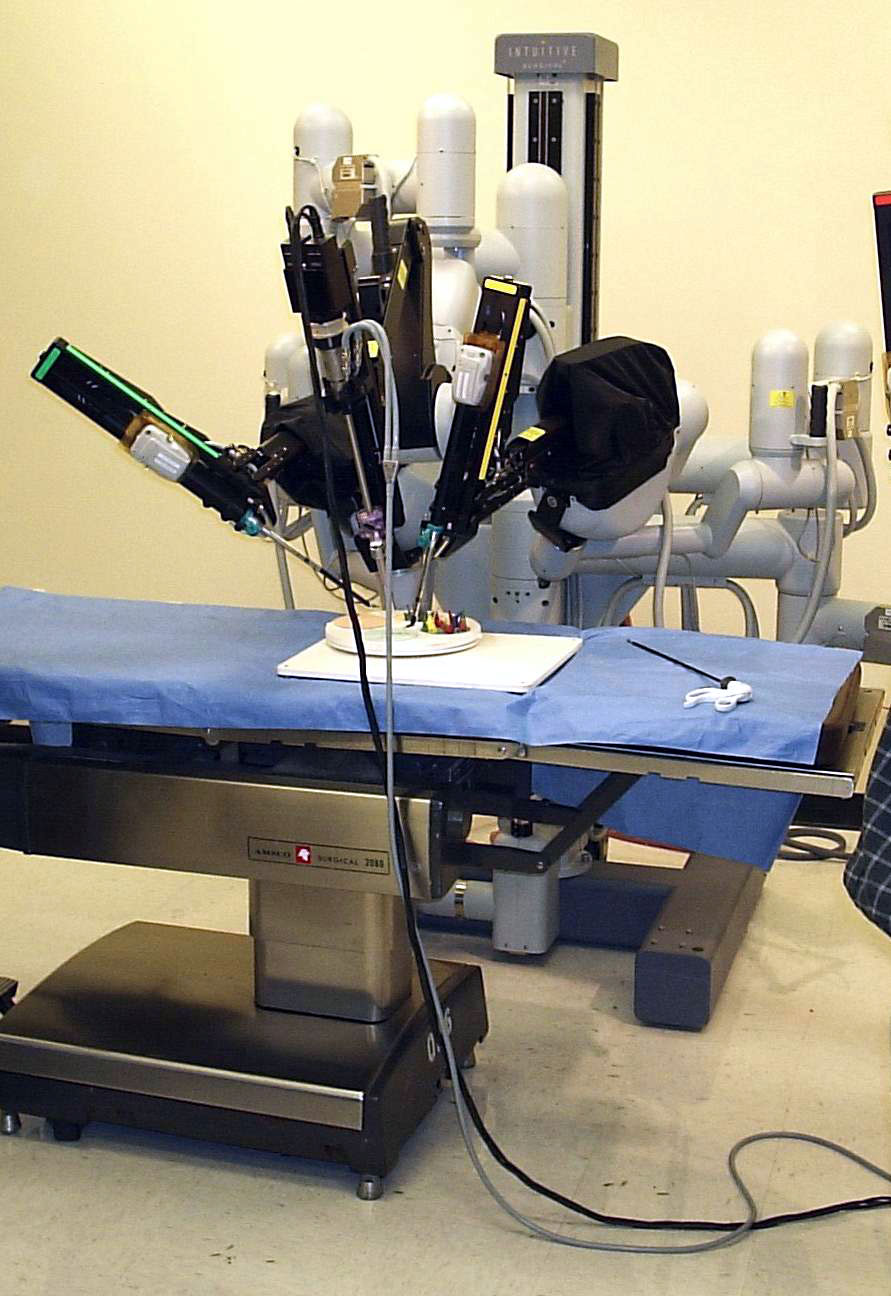
1984 - Arthrobot : Arthrobot est un robot chirurgicale utilisé pour la première fois à Vancouver.
Un robot utilisé dans l'espace
2003 - MER-A et MER-B : Ces deux robots ont pour objectif d'analyser le sol de Mars et de rechercher en particulier des traces d'eau dans le passé géologique de cette planète.







